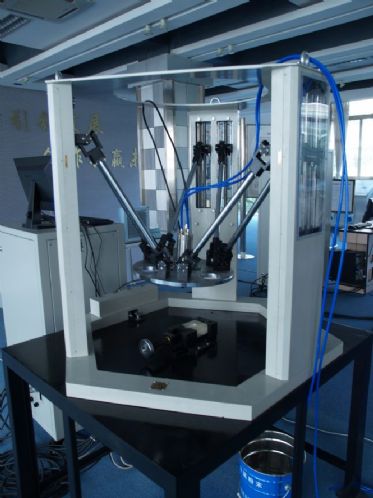
RBT-6S01P六自由度并联机器人
RBT-6S01P六自由度并联机器人是一个多输入多输出的动力学复杂系统,具有高度的能动性和灵活性,广泛应用在飞行模拟器、宇宙飞船空间对接器、六维力与力矩传感器、精密操作微动机器人、虚拟轴加工车床等领域。
性能特点
◆ 切削效率高,成本低;
◆ 工作空间不大,但误差小而精度高;
◆ 结构简单且稳定,传动链极短,操作速度高,易于控制;
◆ 刚度大、质量轻,承载能力高;
◆ 运动负荷小,提高了动力性能;
◆ 运动反解模型简单;
◆ 容易实现“6轴联动”,能加工更复杂的三维曲剧。
技术参数
◆ 结构形式:并联式
◆ 驱动方式:伺服电机驱动
◆ 运动自由度:6自由度
◆ 负载能力:20Kg
◆ 重复定位精度:±0.07mm
◆ 动作范围:X:±150mm
Y:±150mm
Z:±150mm
θx:±20o
θy:±20o
θz:±20o
◆ 每轴最大运动速度:X:100mm /S
Y:100mm /S
Z:100mm /S
θx:20o/S
θy:20o/S
θz:20o/S
◆ 本体重量:≤120Kg
◆ 操作方式:示教再现/编程
◆ 供电电源:单相220V 50Hz 8A
应用领域
◆ 在工业上,可作为6自由度数控加工中心,如GIDDINGS & LEWIS公司开发的并联式VARIAX“虚拟铀机床”;可用于汽车总装线上安装车轮、吊装汽车发动机、大件装配等;
◆ 在航天、航海领域,可用作飞船补给和潜艇救援的对接器;
◆ 用于地下工程,如土方挖掘、煤矿开采;
◆ 作为微动机构或微型机构,可应用于医学、生物等领域上,如眼科手术中,注射抗凝剂到视网膜脉管血凝处;微细外科手术中的细胞操作等。
技术特点
◆ 采用并联式结构,即机器人各连杆两端由虎克铰连接。六连杆上端虎克铰安装于丝杠导轨滑块上,通过滑块运动,带动六连杆运动,是活动平台产生各自由度运动。
◆ 基本机械结构连接方式为原动部件→传动部件→执行部件。
◆ 机器人各连杆采用伺服电机驱动,伺服电机驱动器把运动控制卡提供的低功率的脉冲信号放大为能驱动伺服电机的大功率电信号,以驱动伺服电机带动负载旋转;并通过Windows环境下的软件编程和运动控制器实现对机器人的控制,使机器人运动平台能够在工作空间内任意位置精确定位。
◆ 运动控制卡,由高性能DSP处理器、CPLD可编程器件及伺服电机接口器件等组成,用于实现伺服电机的位置、速度、加速度的控制及多个伺服电机的多轴协调控制。
返回前页