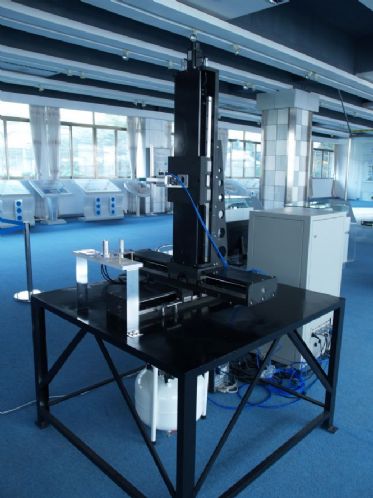
直角坐标机器人
Cartesian coordinate robot
直角坐标机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机,在工业生产中有着十分广泛的应用,特别适用于多品种、便批量的柔性化作业,对于稳定提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
技术特点
◆ 采用丝杠螺母副把电机的旋转运动变为直线运动;
◆ 采用循环式直线滚动导轨约束平台面的运动,动静摩擦系数差别小,灵敏度高,启动阻力小,不易出现爬行现象;
◆ 刚性好、抗振性强,能承受较大的冲击和振动;
◆ 运动灵活平稳,能微量准确运动,定位精度高;
◆ 结构紧凑,体积小;
◆ 工业级的产品设计。
◆ 可实现一自由度直角坐标机器人的直线运动,二自由度直角坐标机器人行程范围内X-Y平面内负载的平面运动,以及三自由度直角坐标机器人行程范围内X-Y-Z空间内负载立体空间运动。
技术参数
◆ 运动范围:500mm
◆ 丝杠螺距:5mm
◆ 重复定位精度:0.05mm
◆ 运动分辨率:0.02mm
◆ 负载:5Kg
◆ 最高速度:100mm/s
应用领域
直角坐标机器人在工业生产中有着十分广泛的应用,因终端设备用途不同,可以装配各种各样的操作工具,用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、喷涂、目标跟随等一系列工作。
返回前页