残疾人假手
为了提高肢体残疾者的生活自理能力、更好地融入社会,高性能假肢的需求非常迫切,仿人型残疾人假手系统(残疾人假手)具有庞大的市场需求和广阔的应用前景。(可参考相关译文)To enhance the functional skills and reintegrate the sociaty of headicapped,the High-tech Artificial Hands is in great demand. The Bionic Headicapped Artificial Hands System(Headicapped Artificial Hand) has great market demand and extensive application prospect.
一、假手构成 Compose of Artificial Hands
残疾人假手样机由5个可独立驱动的手指组成,每个手指有3个活动关节,各关节之间是耦合运动。This prototype consists of 5 independently driven fingers, any of which has 3 joints moving by coupling each other.
二、假手功能 Function
具有关节位置和关节力矩感知功能,机构、传感、驱动和控制系统高度集成;样机重量不超过0.5公斤,包装以后的尺寸与成年人手相仿;采用锂离子电池供电,多个表面肌电极进行控制,可以实现多种运动模式的抓握操作。It has sensory functions of joint position and torque, and mechanism、sensing、driving and control systems integrate highly. This prototype weigh less than 0.5 kg, similar sizes to mankind’s after package. It is supplied power by lithium battery, controlled by several surface myoelectric poles, actualizing grasping of manifold motion patterns.
三、关键技术Key technologies description:
1)(1)、五指仿人手型假手机构的设计。五个手指独立驱动,每个手指的3个关节耦合运动,并且具有拟人化的外观和运动特性(已申请国家发明专利);Design of 5-finger humanoid artificial hands mechanism. Any finger is driven independently, whose 3 joints are moving by coupling each other, owning impersonated appearance and movement behaviors (national patent applied).
2)(2)、新型拇指机构的设计。采用新型的拇指机构,使单电机驱动的拇指具有拟人化的空间运动轨迹(已授权国家发明专利);Design of new thumb. It adopts new thumb mechanism, making thumb driven by singer motor own impersonated space motion path (national patent authorized).
(3)、机构、传感、驱动和控制系统高度集成化。假手具有关节位置和关节力矩感知功能,所有的5个电机放置在手掌内部,控制系统采用基于双DSP的主从分布式结构(已授权国家发明专利)。Mechanism、sensing、driving and control systems integrate highly. It has sensory functions of joint position and torque. 5 motors lie inside palm. Control system adopts master-slave and distributed structure based on doubled DSP(national patent authorized)
3)(4)、基于肌电信号的多自由度假手多种运动模式的控制。采用多个表面肌电传感器(EMG),实现多种运动模式的高正确率、快速识别,并且结合局部自主控制策略,实现假手多种运动模式的肌电控制(已申请国家发明专利)。Control of multi-DOF artificial hands’ manifold motion patterns based on myoelectric signals. It uses several EMG, implementing high correct rate and fast recognition of multi-movement pattern. Combined with local autonomous control strategy, it has realized myoelectric control of multi-movement patterns(national patent applied).
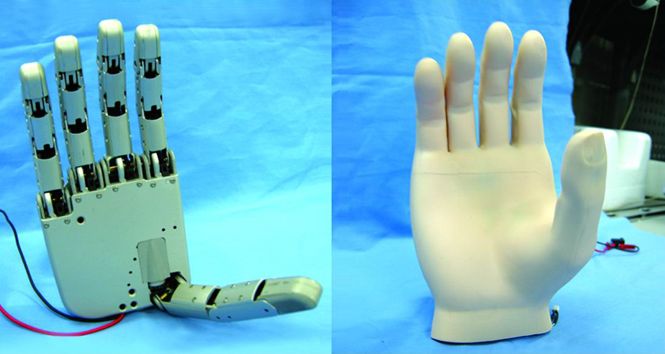
四、样机照片Prototype pictures
图 假手样机及其包装以后的假手照片
artificial-hands prototype and picture after packaging
返回前页