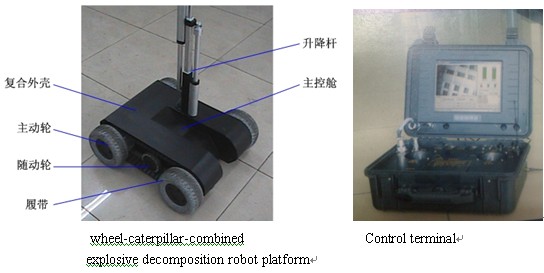
轮履结合式爆炸物分解机器人
作为武警反恐作战平台,专门研制一种用于爆炸物分解的轮履结合式机器人;在民用领域,通过搭载非致命执行单元,可以用于楼宇或重点场合的保安,危险领域的核生化探测等;
作为智能移动平台,可开展各种服务机器人项目,如导游、除草、清洁等。
As the sub-topic research projects of People's Armed Police anti-terrorist combat platforms, specially developed wheel-caterpillar-combined robot for explosive decomposition. For civil use,the robots can be used in buildings or for the security of key occasions by incorporating non-lethal execution unit, and in dangerous areas they can be used in such as nuclear biological and chemical detection.
一、关键技术Key Technology Description:
(1)、小型化结构移动平台Miniaturize structure mobile platform
围绕快速移动、越障能力、自主作业等目标,设计了新型本体结构。为提高移动平台稳定性、可靠性和负载能力,降低自重带来的能源供给负担,对机器人重要构件进行了强度设计与尺度综合;对移动平台在各种可能工况下快速移动、抵抗冲击的运动学、动力学进行了研究;为提高移动平台环境适应能力,各功能装置和结构进行模块化封装,便于互换和维护。
Around the fast-moving, the ability of climbing over obstacles, self-operating and other objectives, design a new type of body structure.To enhance the stability, reliability and load capacity, reduce its energy supply burden caused by the weight of mobile platform itself,we carry out the strength design and dimensional synthesis for the important parts of robot;do the research about kinematics and kinetics of fast moving,impact resistence in a variety of possible operating conditions;do modular packages for functional devices and structures in order to enhence thr robot platform's environmental adaptability,easy to exchange and maintenance.
(2)、高集成度嵌入式控制系统Highly integrated embedded control system
针对移动平台小型化需求,设计了嵌入式控制器、大功率低功耗驱动、高效能源管理、多传感器信息处理模块等系统组件,基于可靠性原则解决了不同类型的器件和电路芯片封装时产生的串扰、辐射、热耗散等问题。
For the demand of the miniaturization of mobile platforms,we designed embedded controllers, high-power low-power-consumption driver, efficient energy management, multi-sensor data processing module and other systems components,solved the problems of crosstalk, radiation, heat dissipation and so on when package different types of devices and circuit chip based on the principle of reliability.
(3)、基于激光制导的目标跟踪系统Target tracking system based on laser-guided.
围绕快速响应、可靠追踪两个重要目标,完成了激光制导目标跟踪系统的设计。通过合理设计寻的系统,满足移动平台目标跟踪的快速性;进行追踪引导规律、制导指令算法的研究,确保了系统目标跟踪的可靠性。
Around the two important goals of fast response, reliable follow-up,we completed a laser-guided target tracking system design.Through the rational design of the system,we meet the goal of rapid-tracking;we did the research of the law of tarck and guide and the algorithm of guide instruction to ensure system target tracking reliability.
(4)、长距离光介质控制器Long distance optical media controllor
基于系统安全冗余度考虑,结合反恐现场条件,研制了光介质指令控制器。设计了大功率光信号发射装置、高灵敏度大角度光信号接收装置,以及基于低噪声前置放大装置的信号过滤算法,实现光介质控制器的长距离遥控,提高环境适应能力,确保操作可靠性。
Considered about system safety redundancy,combined with anti-terrorism field conditions,we developed optical media instruction controller.We designed a high-power optical signal transmission devices, high-sensitivity wide-angle optical signal receiving device, as well as signal filtering algorithms based on low-noise preamplifier to achieve long-distance remote control for optical media controller and improve environmental adaptation capability ,and to ensure operational reliability.
二、主要指标 Parameter
(1)、重量:20Kg weight:20kg
(2)、整体尺寸:长宽高550X492X185mm Dimemsion: 550X492X185mm
(3)、负载能力:10公斤 load capacity:10kg
三、功能特点 Function:
(1)、采用轮履复合驱动方式,锂聚合物电池提供动力,搭载CCD摄像头; Wheel-caterpillar-combined drive mode,lithium-polymer battery-powered, equipped with CCD camera;
(2)、具有较强越障能力,可爬坡、跨越沟壑、灵活转向,机动性良好;strong ability to climb, across ravines, and flexible steering, good mobility;
(3)、运动速度1.2 m/s,续航时间30分钟;velocity 1.2 m / s, life time of 30 minutes
(4)、机器人携带爆炸物分解用水炮,通过自动升降机构,将水炮调整至适当高度,实现目标对准和爆炸物分解;Robot carries the water cannons which are used for explosives decomposition,and adjust them to an appropriate height to achieve goal alignment and explosives decomposition by automatic lifting bodies.
(5)、机器人采用无线控制、有线遥控、激光自主导航相结合的复合控制方式,可视具体应用场合加以选择,从而有效解决反恐现场信号屏蔽的问题;Robot using wireless control, wired remote control, a combination of laser-autonomous navigation compound control method,can be selected depending on the particular applications in order to effectively solve anti-terrorism field signal shielding problems.
四、应用领域Application
(1)、针对反恐应用场合的爆炸物威胁,可以搭载高性能水炮,对爆炸物进行自动跟踪与爆破分解,确保公共场合安全和民众生命财产安全;For anti-terrorism threats of explosives,robot can be equipped with high-performance water cannons to track explosives automaticly and blasting decompose , to ensure the safety of public places and the people's lives and property;
(2)、在军事领域,可以根据任务需要搭载不同执行单元,可以应用在热点区域的值守、巡逻、警戒;In the military field, can carry different implementation unit depend on tasks, can be used in hot spot areas in duty, patrolling, guard
(3)、在民用领域,通过搭载非致命执行单元,可以用于楼宇或重点场合的保安,危险领域的核生化探测等。For civil use,the robots can be used in buildings or for the security of key occasions by incorporating non-lethal execution unit, and in dangerous areas they can be used in such as nuclear biological and chemical detection
(4)、作为智能移动平台,可开展各种服务机器人项目,如导游、除草、清洁等。As an intelligent mobile platform, a variety of service robots projects can be carried out, such as guides, weeding and cleaning.
五、样机照片Prototype photo and description:
返回前页